Ubuntu22.04安装ROS1 Noetic和ROS2 Humble
最新更新于: 2025年9月18日下午4点31分
由于乐聚Kuavo机器人下位机用ROS1,而我们代码是在原先上位机ROS2中完成,因此需要安装ros1_bridge来进行通讯,现在换成AGX Jetson 6.2.1 Ubuntu22.04,安装ROS1 Noetic和ROS2 Humble才可以启动ros1_bridge,这里总结出一个比较简单易用的流程。
环境配置
我们的安装环境为Docker Ubuntu 22.04,AGX容器下载及启动方法请见Jetson AGX Orin配置 - docker测试容器cuda可用性
参考教程
- GitHub Gist - Meltwin/Noetic-Ubuntu22.04.md,这里详细给出了
rosdep如何修复,但是我修复了还是无法通过rosdep自动安装依赖,还不如手动安装全部依赖 - 知乎 - Ubuntu22.04 安装 Ros1 Noetic,这个更像是上文的中文翻译版,内容差不多,但是
rosdep还是不能用 - ppqppl blog - ROS安装详细教程 - Ubuntu22.04LTS安装,这个介绍比较详细,并给出的全部的依赖包无需一个个找了(就是Blog无法直接复制内容,不知道什么原因)
ROS2 Humble安装
在Ubuntu22.04上面可以直接按照官方流程完成ROS2的安装
ROS1 Noetic安装
安装编译依赖
sudo apt-get install python3-rosdep python3-rosinstall-generator python3-vcstools python3-vcstool build-essential创建ROS1编译路径
mkdir ~/noetic_ws
cd ~/noetic_ws下载desktop版的ROS1 Noetic到 ~/noetic_ws/src 文件夹下
rosinstall_generator desktop --rosdistro noetic --deps --tar > noetic-desktop.rosinstall
# 或者安装desktop-full
# rosinstall_generator desktop --rosdistro noetic --deps --tar > noetic-desktop.rosinstall
mkdir ./src
vcs import --input noetic-desktop.rosinstall ./src注意:vcs 这一步下面会出现很多的点点 .,就表示完成下载,如果出现 E 就说明无法下载,最后命令结束后会显示有哪些包没下下来并给出路径,这个下载路径是正确的,可能是Python的BUG,因此只需要重新下载下来解压放进去即可,例如我遇到的 rosconsole_bridge 和 xmlrpcpp 重新下载,以 rosconsole_bridge 下载为例
wget https://codeload.github.com/ros-gbp/rosconsole_bridge-release/tar.gz/refs/tags/release/noetic/rosconsole_bridge/0.5.5-1
# 解压
tar -xf 0.5.5-1
# 会得到一个文件夹, 直接移动到 ~/noetic_ws/src 下即可
mv rosconsole_bridge-release-release-noetic-rosconsole_bridge-0.5.5-1 ~/noetic_ws/src手动安装全部依赖包:
sudo apt install libboost-all-dev uuid-dev python3-nose google-mock libgtest-dev libbz2-dev libgpgme-dev libssl-dev python3-coverage libboost-program-options-dev python3-psutil python3-opengl python3-pygraphviz python3-pydot qt5-qmake sbcl libapr1-dev libaprutil1-dev libboost-regex-dev liblog4cxx-dev python3-matplotlib libpyside2-dev libshiboken2-dev pyqt5-dev python3-pyqt5 python3-pyqt5.qtsvg python3-pyside2.qtsvg python3-sip-dev shiboken2 lm-sensors graphviz python3-paramiko python3-pycryptodome python3-gnupg python3-defusedxml python3-pyqt5.qtopengl libcurl4-openssl-dev libpoco-dev libogre-1.9-dev libassimp-dev libogre-1.9.0v5 libyaml-cpp-dev libgl1-mesa-dev libglu1-mesa-dev libqt5opengl5 libqt5opengl5-dev libopencv-dev python3-opencv python3-pykdl tango-icon-theme liborocos-kdl-dev libtinyxml-dev libtinyxml2-dev liburdfdom-headers-dev python3-numpy python3-empy libboost-filesystem-dev libboost-thread-dev python3-pygraphviz python3-pygraphviz python3-mock libboost-date-time-dev libboost-system-dev liburdfdom-dev libboost-chrono-dev libboost-dev libqt5core5a libqt5gui5 libqt5widgets5 qtbase5-dev libconsole-bridge-dev liblz4-dev python3-pyqt5.qtwebkit exfatprogs后面会出现 rosconsole 的编译报错,提前修复下,重新git下来,切换分支替换回去:
git clone https://github.com/lucasw/rosconsole.git
cd rosconsole
git checkout concise_output_roso
cd ..
# 删除下载下来的错误包
rm -rf ~/noetic_ws/src/rosconsole
# 替换过去
mv rosconsole ~/noetic_ws/src/rosconsole后面还会出现 shared_mutex 的报错,修改 /usr/include/log4cxx/boost-std-configuration.h 内容:
#define STD_SHARED_MUTEX_FOUND 1
#define Boost_SHARED_MUTEX_FOUND 0变为
#define STD_SHARED_MUTEX_FOUND 0
#define Boost_SHARED_MUTEX_FOUND 1开始编译并安装(我安装的是 desktop 版本总共184个包,AGX 30W功率下全部编译完成用时33min59s,建议用jtop切换为MAXN模式,速度会快一倍)
sudo mkdir /opt/ros/noetic
sudo ./src/catkin/bin/catkin_make_isolated --install -DCMAKE_BUILD_TYPE=Release --install-space /opt/ros/noetic如果分开编译和安装,可能在安装时报错,因此还是这样编译并安装成功率更高

最后安装下
sudo apt install python3-roslaunch测试 roscore 可不可以使用
source /opt/ros/noetic/setup.sh
roscore完成上述全部安装后,编译代码就没有用了,可以删除全部代码。也可以仅删除编译缓存释放空间,避免后续出BUG要重新编译而重复下载
# 删除编译和开发目录,这会释放G字节级别的空间
cd ~/noetic_ws
rm -rf build_isolated devel_isolated install_isolated测试ROS1和ROS2
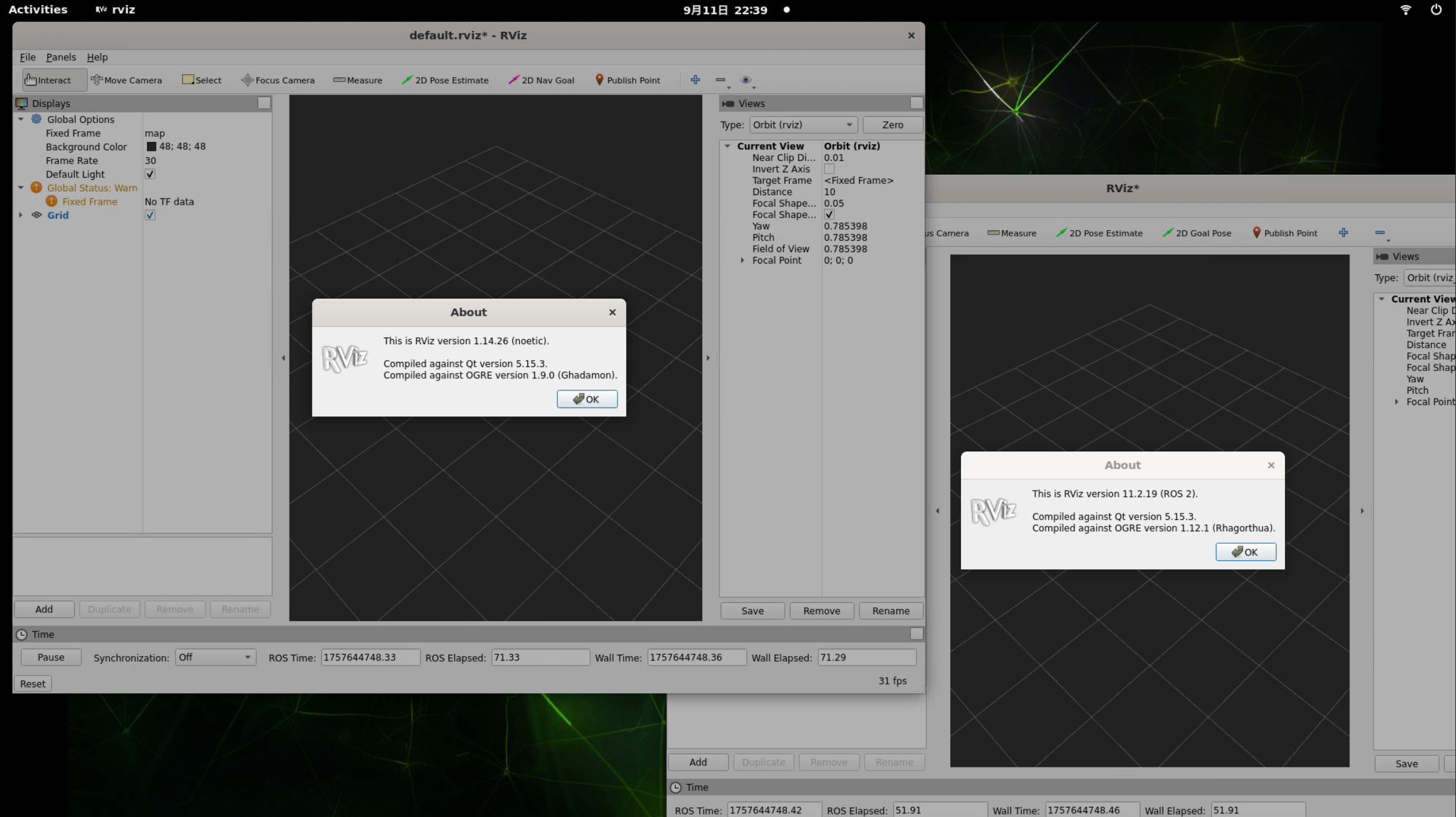
这里简单测试下rviz是否都可以启动
# 终端1
source /opt/ros/noetic/setup.sh
roscore
# 终端2
source /opt/ros/noetic/setup.sh
rviz
# 终端3
source /opt/ros/humble/setup.sh
rviz2可以得到如下的效果