乐聚Kuavo42机器人真机调试日志
最新更新于: 2025年9月8日中午11点47分
总结下每次调试乐聚Kuavo42真机遇到的问题
基础操作
# 真机启动指令为
roslaunch humanoid_controllers load_kuavo_real.launch cali:=true cali_arm:=true
# 关闭所有ros服务, ros意外退出可以用该方法清理
pkill -i ros
# 查看当前是否有正在运行的node
rosnode listHost leju_down
HostName 192.168.31.102
User lab
# Password: 三个空格
Host leju_up
HostName 192.168.31.73
User kuavo
# Password: leju_kuavo下肢标定
当机器人下肢初始化回到零点时,存在肉眼可发现的不平行,则需要重新标定下肢,首先将所有的“绿色工装”(一共10个)插入机器人下肢对应的关节处,保证每个关节都无法移动即可,我们先手动保存之前的offset.csv文件,位于/root/.config/lejuconfig/文件夹下,将其剪切为另一个文件名即可mv offset.csv offset.csv.bak,进入到MPC控制的项目中执行
cd ~/kuavo-ros-opensource
sudo su
source devel/setup.bash
roslaunch humanoid_controllers load_kuavo_real.launch cali:=true cali_leg:=true cali_arm:=true出现
...
输入`c`保存当前零点位置
...按键盘c即可将当前机器人的零点位置保存在上述位置,拆下工装即可,后续即可正常工作
日志
2025.3.10.
上午
10:30到曲江开始调机器人
pull kuavo-rl-controller-xjtu仓库测试通讯延迟问题,结果直接运行该仓库下的humanoid_controllers无法找到电机报错
Error: Joint 10 joint status error!1 分别测试在bash,zsh下运行kuavo-rl-opensource仓库中的humanoid_controllers虽然能够站立,但行走存在明显延迟,不稳定,有问题
再测试mpc控制kuavo-ros-opensource:beta 8d17a39e2ff9a341d542adf36e2bd63d281c33ed,只能bash启动,应该是缺少source的库文件,修复下zsh
# /root/.zshrc加入, 应该是libdrake.so没找到的问题
export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:/opt/drake/lib可以在bash或zsh下正常使用mpc控制了
用
passwd root将下位机的root密码也设置为三个空格了,不然ssh无法直接连上root
难道是installed中的interface版本问题,尝试再用zsh运行kuavo-rl-opensource,仍然不行,走路严重右偏移;尝试bash下再运行kuavo-rl-opensource,依旧有问题
下午
休息到2:40开始继续调
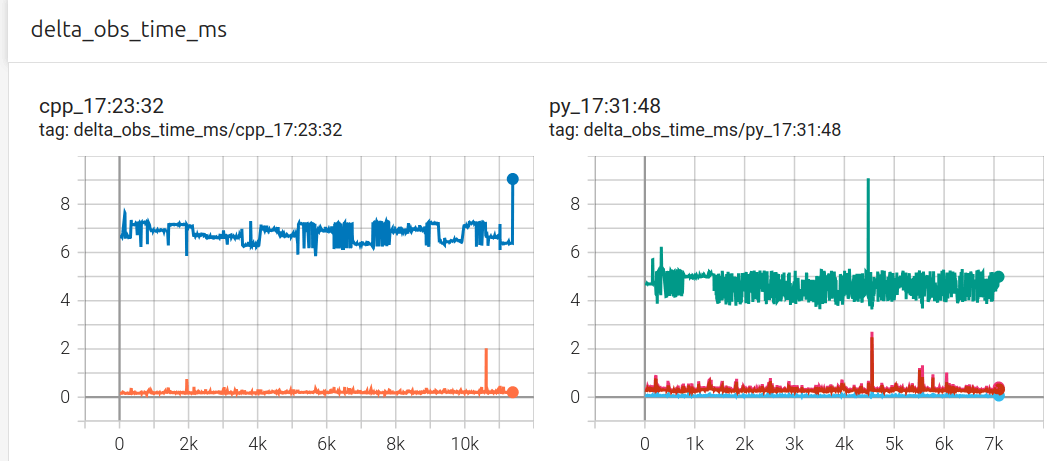
用nomachine测试下mujoco仿真的效果,发现python的exec执行速度非常慢,最高延迟到35ms无法接受
安装下pip install onnxruntime-openvino,用openvino试下能否有优化
调取tensorboard报错TypeError: MessageToJson() got an unexpected keyword argument 'including_default_value_fields:降级即可解决pip install tensorboard==2.12.0 protobuf==3.20.2
在下位机上测试预测时间误差,没看出很大问题
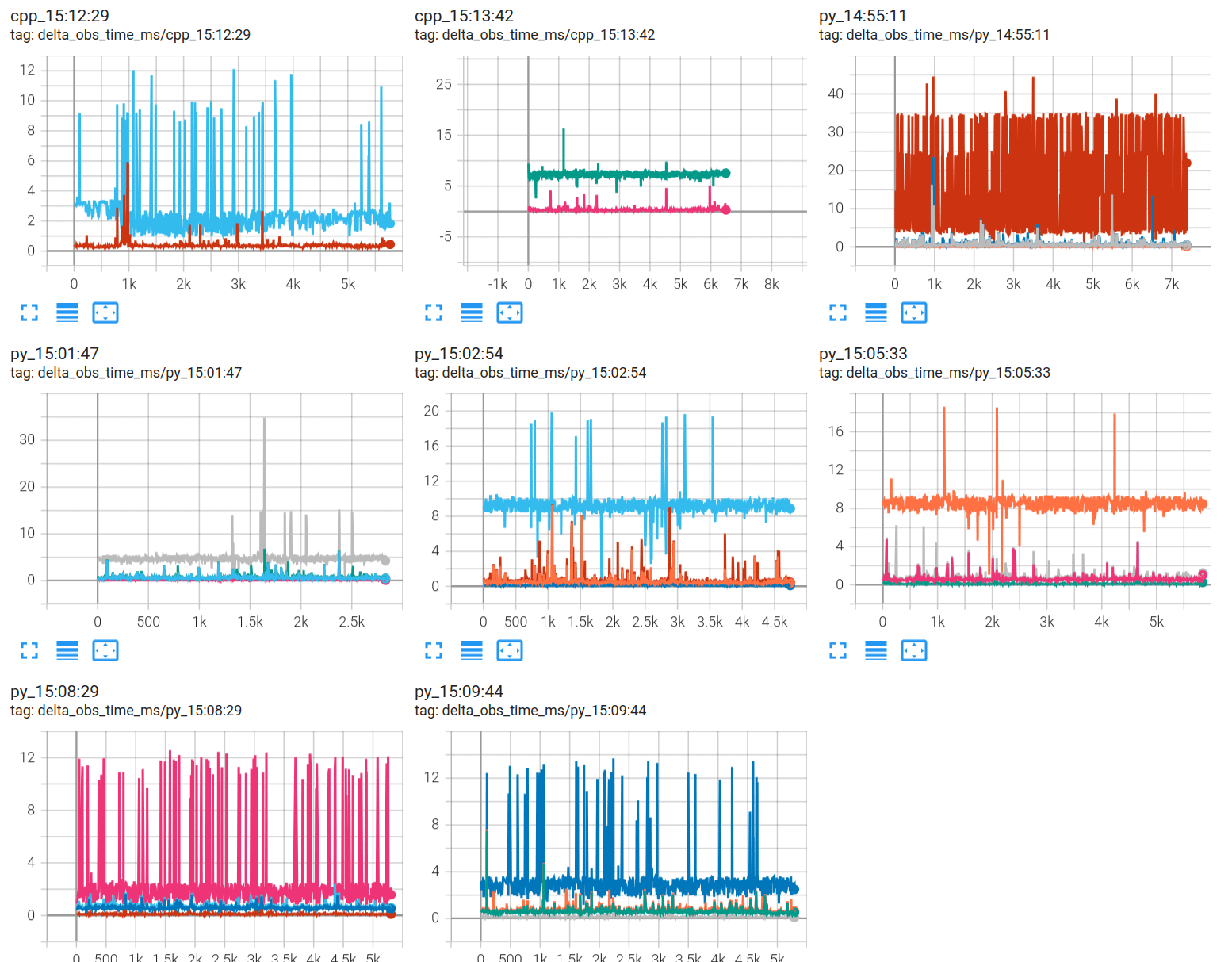
通过将~/kuavo-rl-opensource/installed拷贝到~/kauvo-rl-controller-xjtu/下,即更换驱动程序,使kuavo-rl-controller-xjtu的程序可以运行,得到的延迟曲线如图所示,虽然延迟不高,但不清楚为什么控制效果仍然非常不好,有明显的颤抖(这个重启下电机即可)
启动kuavo-rl-controller-xjtu可能出现以下问题,但是执行kuavo-rl-opensource就不会有问题,执行一遍kuavo-rl-opensource后再执行kuavo-rl-controller-xjtu就又好了,非常迷
[HardwareNode]正在等待 cppad 构建完成...
...
[ INFO] [1741594703.970564987]: Waiting for 'initial_state' parameter to be set...不是很理解为什么,正常rl走一次路以后,就再无法正常了
测试:
- 重启电机电源,启动
kuavo-rl-opensource,走路偏右侧 - 再次重启电机电源,启动
kuavo-rl-opensource,走路偏右侧 - 直接启动
kuavo-rl-opensource,走路偏右侧更严重,走着走着倒了 - 重启电机电源,启动
kuavo-rl-opensource,没有成功站起来,初始时弯曲不正确 - 重启电机电源,启动
kuavo-rl-opensource,走的非常不稳,掉了个六角杯头螺丝下来 - 重启电机电源,启动
kuavo-ros-opensource-beta,OK MPC很稳定没有任何问题,就是向前走路声音非常吵 - 直接启动
kuavo-rl-opensource,仍然向右偏非常严重,自己倒了 - 重启电机,用bash启动
kuavo-rl-opensource,仍然向右偏非常严重,自己倒了 - 重启电机,启动
kuavo-rl-controller-xjtu/humanoid_controllers,仍然右偏严重,控制命令都有向左的方向即可稳住不倒 - 直接启动
kuavo-rl-controller-xjtu/rl_controller_xjtu,基本无法行走,抬腿速度非常缓慢,对命令的执行也非常慢(如下图所示,从命令的时间延迟上没看出什么区别) - 直接启动
kuavo-rl-opensource,虽然向右偏,但能基本走 - 直接启动
kuavo-rl-opensource,走了一半后,基本无法抬腿,颤抖非常严重 - 重启电机,启动
kuavo-rl-opensource,虽然向右偏,但基本能走,最后摔倒 - 直接启动
kuavo-ros-opensource-beta,站起来时候直接倒下,掉了一个长的沉头螺丝,重新装回去了 - 重启电机,启动
kuavo-ros-opensource-beta,向前走非常不稳,高度站得很低,最后走倒了(日志时间为~/.ros/stdout/2025-03-10_17-57-33) - 重启电机,启动
kuavo-ros-opensource-beta,9号电机编码器直接无法读取到数据了,无法启动(日志时间为~/.ros/stdout/2025-03-10_17-59-56)
2025.3.11.
上午
10点30到曲江开始调试
按照机器人关节标定教程对机器人进行重新标定
# 执行
source devel/setup.bash
roslaunch humanoid_controllers load_kuavo_real.launch cali:=true cali_leg:=true cali_arm:=true
# 显示如下信息
0000012766: Slave 1 actual position 13.7060546,Encoder 89824.0000000
0000012776: Rated current 39.6000000
0000012786: Slave 2 actual position -0.4518127,Encoder -1645.0000000
0000012796: Rated current 11.7900000
0000012806: Slave 3 actual position 24.7090759,Encoder 89963.0000000
0000012816: Rated current 42.4300000
0000012826: Slave 4 actual position -1.4784240,Encoder -9689.0000000
0000012836: Rated current 42.4300000
0000012846: Slave 5 actual position 5.2983093,Encoder 69446.0000000
0000012856: Rated current 8.4900000
0000012866: Slave 6 actual position 6.0652160,Encoder 79498.0000000
0000012876: Rated current 8.4900000
0000012887: Slave 7 actual position 16.2445068,Encoder 106460.0000000
0000012897: Rated current 39.6000000
0000012906: Slave 8 actual position -4.8746337,Encoder -17748.0000000
0000012916: Rated current 11.7900000
0000012927: Slave 9 actual position -2.0871276,Encoder -7599.0000000
0000012937: Rated current 42.4300000
0000012946: Slave 10 actual position -17.6039123,Encoder -115369.0000000
0000012956: Rated current 42.4300000
0000012966: Slave 11 actual position -3.6605835,Encoder -47980.0000000
0000012977: Rated current 8.4900000
0000012987: Slave 12 actual position 10.4799652,Encoder 137363.0000000
0000012997: Rated current 8.4900000
0000013010: Slave 13 actual position 18.7921142,Encoder 68420.0000000
0000013019: Rated current 14.9900000
0000013029: Slave 14 actual position -4.8100891,Encoder -17513.0000000
0000013039: Rated current 14.9900000
# 按c保存当前偏移量到~/.config/lejuconfig/offset.csv文件中2025.3.15
发现是因为机器人腿部侧面的tx线松了导致的问题,将机器人送到北京去
2025.3.16~2025.3.19
去北京的通研院学习,结果对方在准备中关村论坛没时间,我们简单学习了rl训练的方法,对方也主要做mpc,做rl的人也不清楚最初训练的细节,所以只能靠我们自己摸索了,思路就是在isaacgym/sim下训练,迁移到mujoco(python和C++)版本,如果稳定则迁移真机
2025.4.1.
先发现机器人标定关节不准,重新进行了标定,分别走了下官方的RL和MPC没什么大问题
cd kuavo-rl-controller-xjtu
roslaunch humanoid_controllers load_kuavo_real.launch cail:=true cali_arm:=true joystick_type:=bt2